RGYG-5500 - Funzioni e altro
Il mio sito
Funzioni e altro
Menu principale:
RGYG-5500
altro
(anno 2002)






.


Idea base ( ADC0831)
Girovagando in Internet alla ricerca di Moduli di Acquisizione Dati, a destato il mio interesse questo
semplice Convertitore Analogico/Digitale a soli 8 bit ADC0831 controllato dalla porta parallela del
Computer. Questo convertitore usa un integrato a soli 8 pin(vedi fig. sotto).
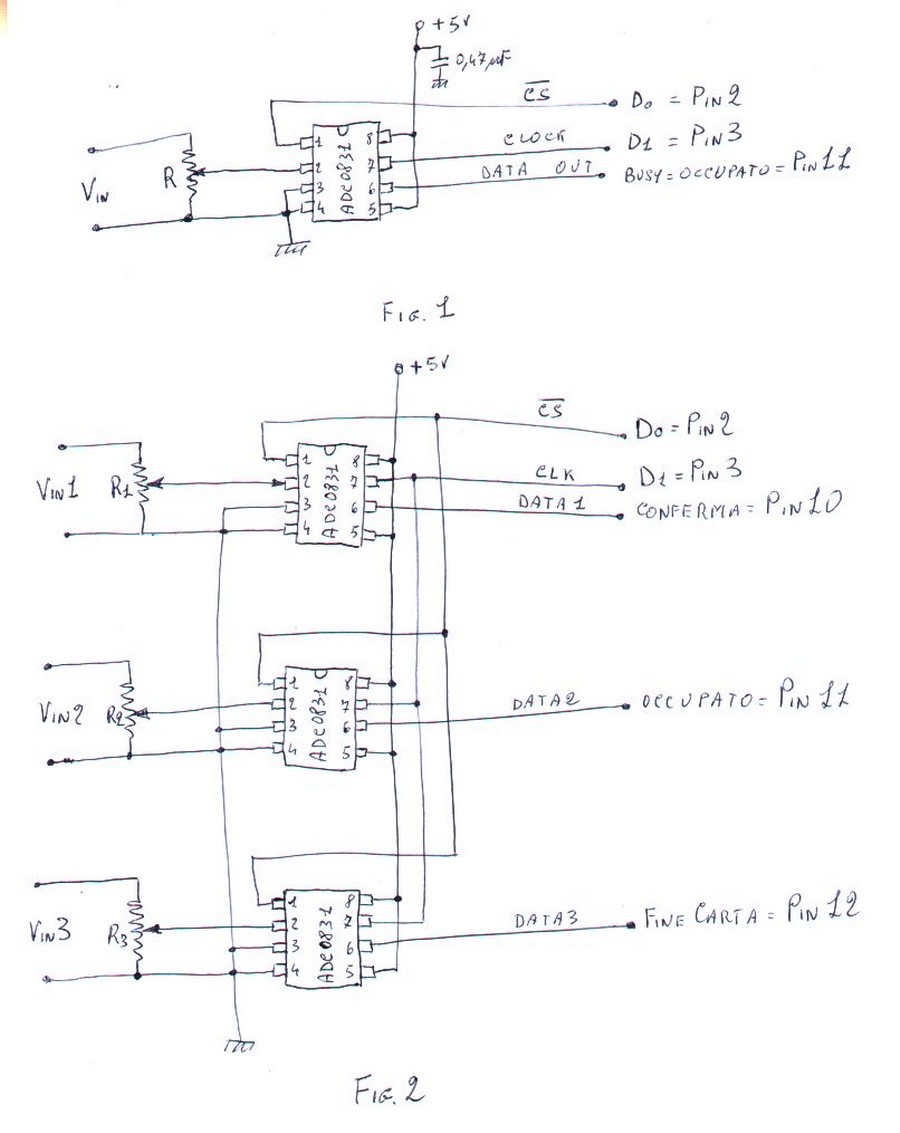
Da cui si è subito realizzato il circuito mostrato in fig1.
Una semplice descrizione del suo funzionamento è il seguente.
Si collega all’alimentazione (+5Volt) sia Vcc che Vref (Tensione di riferimento ) per avere la
massima definizione. Si collega a massa il piedino GND e Vin- mentre il piedino Vin+ alla
tensione di ingresso attraverso il partitore R . Il piedino CS (Chip Select) si collega al pin 2
della Parallela ( D0) mentre il piedino CLK (Clock) si collega al pin 3 della parallela (D1).
Infine il piedino DO (Data Out) si collega al pin 11 della parallela (Busy=Occupato).
Da ciò si può immediatamente dedurre che la parallela invia i comandi dai pin 2 e 3 (pin di uscita)
e riceve i dati dal pin 11 (pin di ingresso).
La procedura per acquisire un dato è moto semplice.
Per primo si manda il CS al valore uno per deselezionare il cip e subito dopo mettere il CS a zero
per poter ricevere i dati (vedi figura sopra ADC0831 Timing, solo con CS a zero è possibile ricevere i dati).
Poi si invia un Clock per avviare il sistema e successivamente 8 Clock per Acquisire da DO
(Data Out) il valore di uscita.
Un Clock significa portare a livello uno e subito dopo a livello zero il piedino CLK
(vedi ADC0831 Timing) .
A questo punto si è letto in forma digitale il valore della tensione applicata al piedino Vin+ .
Per controllare i motori del rotore Yaesu G-5500 non basta leggere una sola tensione ma ne
occorrono due, e per una migliore operatività, occorre leggere una terza tensione quella dell’SMeter.
Perciò dal circuito di fig.1 si arriva al circuito di fig.2 . Si nota immediatamente di aver messo
in comune il piedino 1 dell’ADC0831 (CS) e il piedino 7 (CLK) , in questo modo il Cip Select e
il Clock avverranno contemporaneamente ai tre integrati e si potrà leggere contemporaneamente
le tre tensioni.
Appena realizzato il circuito è stato scritto un semplice programmino di prova per verificare
immediatamente le sue prestazioni (vedi listato sotto).
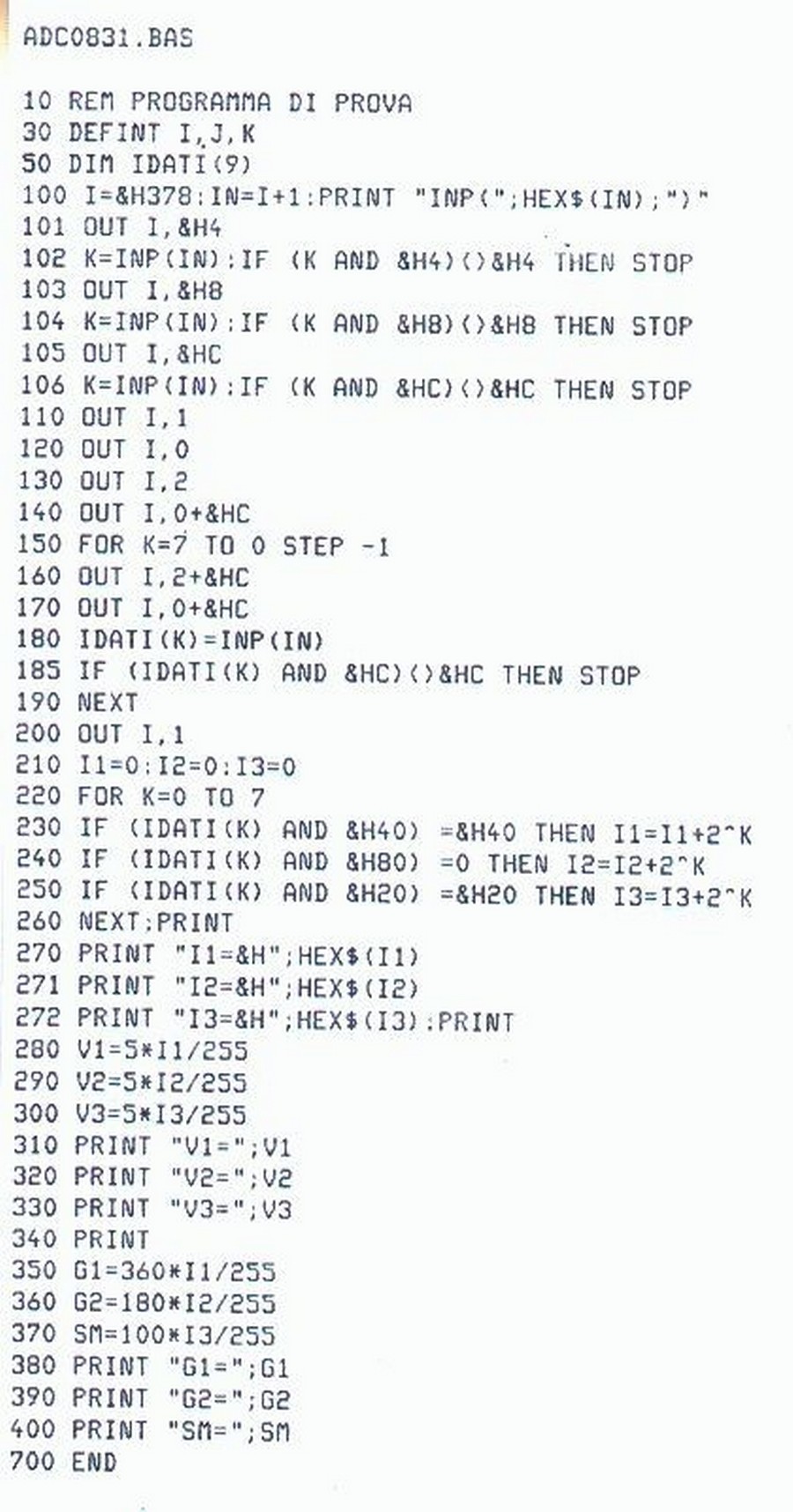
Listato in GWBasic per ADC0831
Fine Listato
Sul listato non occorrono molte spiegazioni essendo molto elementare.
Si può far notare alcune cose.
Dalla riga 240 si può vedere che il piedino di ingresso della parallela (Busy=Occupato)
lavora alla rovescio .
Il valore 0 deve essere considerato un 1 e il valore 1 uno 0. Questo strano comportamento
deriva dal fatto che la parallela non è stata progettata per acquisire dati, ma ricevere
informazioni dalla stampante .
Il valore I1,I2,I3 sono il valore in acquisizione per le tensioni di ingresso comprese
nel campo 0-255 essendo ADC0831 un convertitore a 8 bit. Per conoscere il valore
della tensione sul piedino 2 (Vin+) occorre la formula 5*I/255 (avendo posto il piedino
Vref a +5Volt). Perciò V1,V2,V3 sono rispettivamente le tensioni presenti sui piedini di
ingresso dei loro rispettivi integrati.
Nel nostro caso essendo il valore di Azimut variabile da 0-360 il Valore di Elevation
variabile da 0-180 e SMeter variabile da 0-100 si possono ottenere G1,G2,SM
(G1,G2 espresso in gradi e SM espresso in percentuale, il tutto ovviamente dopo
una appropriata taratura).
Ora che abbiamo acquisito i valori di Azimut,Elevation e SMeter vediamo come possono
essere comandati i motori dello Yaesu G-5500 .
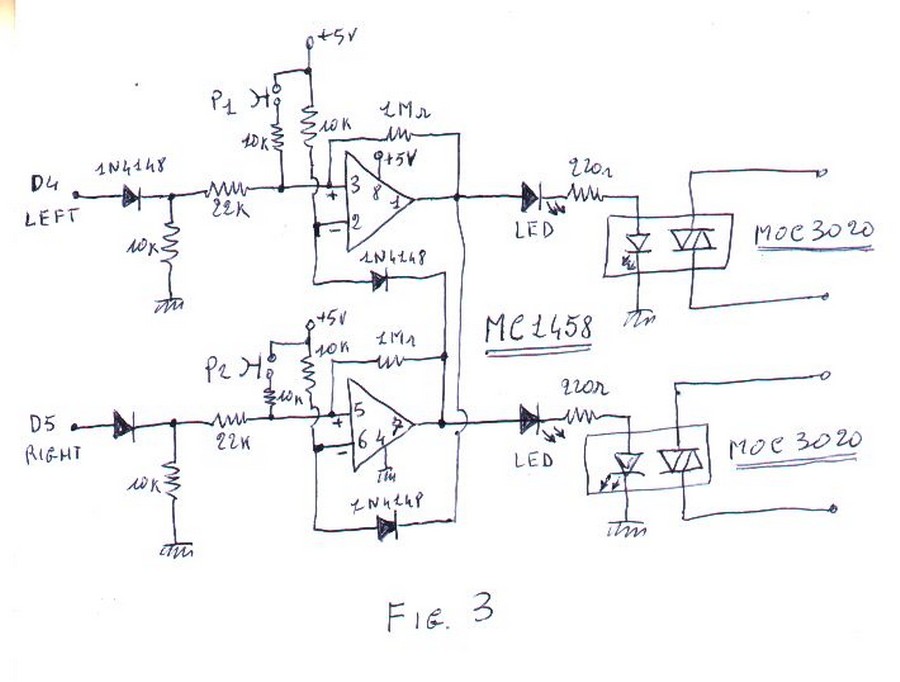
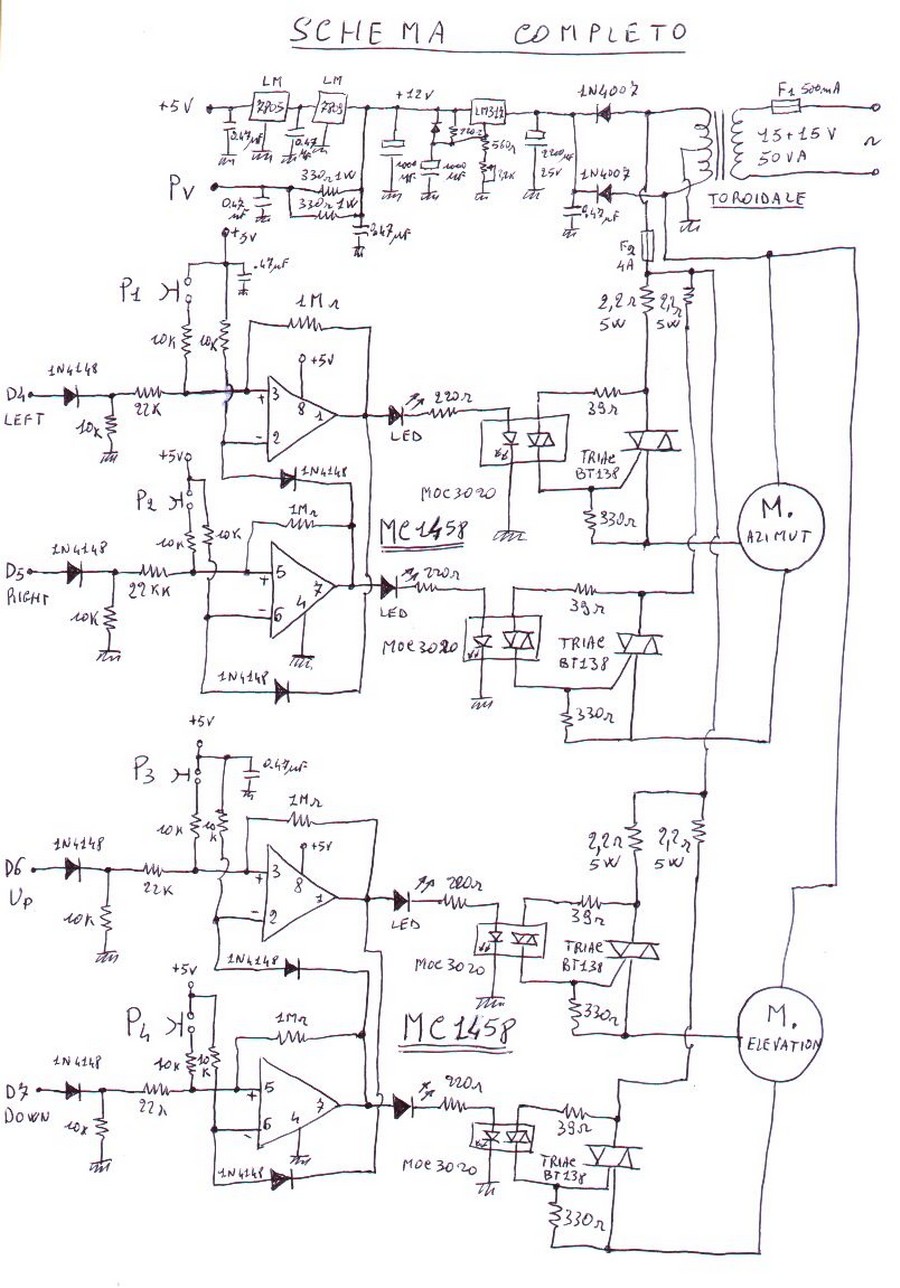
Per questo è stato progettato il circuito di Fig. 3.
Si è usato l’integrato MC1458 . Quando il Pin6 (D4) della Parallela va al valore alto l’uscita del Pin 1
dell’integrato MC1458 va al valore +5Volt ,il quale farà illuminare il Led e attivare il MOC3020 che
collegato ad un Triac avvierà il motore. Lo stesso risultato si otterrà con la seconda metà dell’MC1458.
Quando il pin7 (D5) della parallela va al valore alto il Pin 7 dell’MC1458 andrà al valore +5Volt ,
fara illuminare il Led ,attivare il suo MOC3020 che attraverso il suo Triac avvierà il motore.
Il Pin6 (D4) della parallela deve far ruotare il motore a sinistra, mentre il Pin7 (D5) della parallela
deve far ruotare il motore a destra. Siccome tutti sappiamo che un motore non può girare
contemporaneamente a destra e a sinistra qualcuno avrà già notato che l’MC1458 è stato configurato in modalità Flip-Flop .
Questa configurazione impedisce ai Pin 1 e 7 dell’integrato MC1458 di essere
contemporaneamente a livello alto. Per esempio se il pin6 (D4) della parallela va al valore alto il
pin 1 dell’MC1458 va al valore alto ,ma contemporaneamente il Pin 6 dell’MC1458 va al valore alto,
il quale impedirà al Pin 7 dell’integrato MC1458 di andare al valore alto quando dovesse arrivare un
valore alto al pin7 (D5) della parallela.
Questa configurazione non è stata progettata perché i Pin6 (D4) e Pin7 (D5) della parallela vadano
contemporaneamente al valore alto, (questo potrebbe succedere solamente tramite un errore software) ma solo nel caso di premere contemporaneamente i pulsanti P1 e P2.
Avendo usato il circuito di Fig. 3 per il motore di Azimut, un identico circuito deve essere usato per
il motore di Elevation. Al posto dei Pin6 (D4) e Pin7 (D5) della parallela andrà i Pin8 (D6) e Pin9 (D7) .
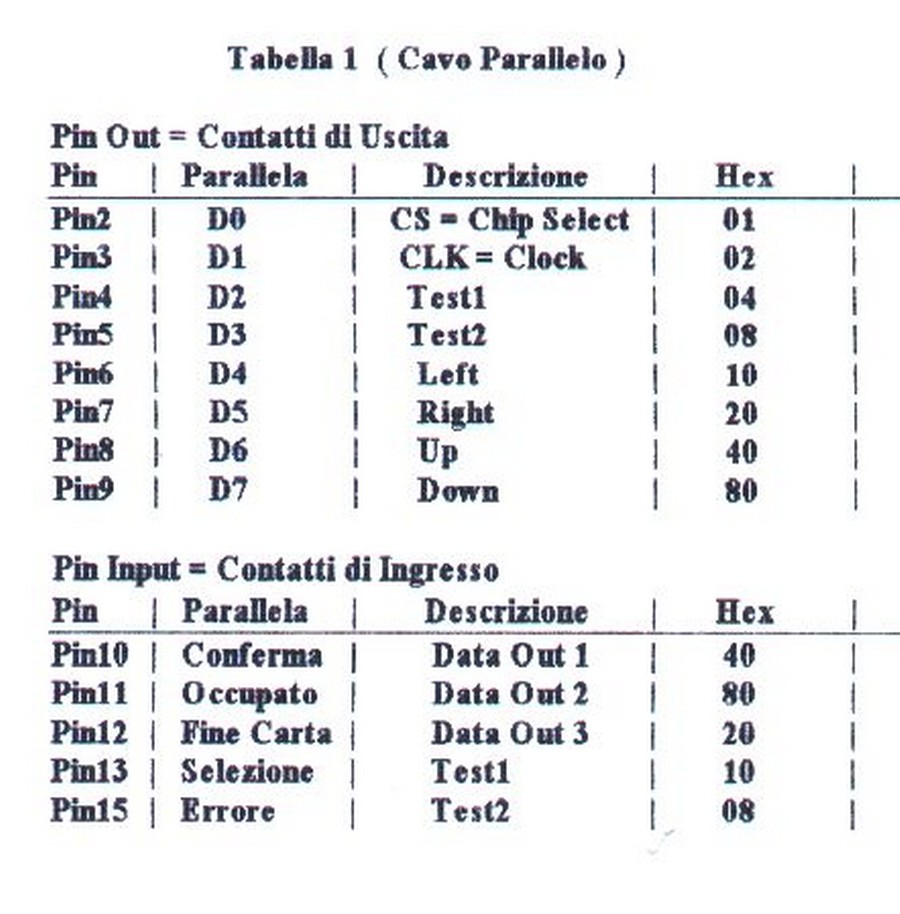
A questo punto si è in grado di capire la seguente Tabella 1 relativa all’interfaccia per il controllo del rotore.
Il Pin4 (D2) e Pin5 (D3) in coppia con i Pin13 (Selezione) e Pin15 (Errore) servono per il sottoprogramma Test che verifica la presenza o meno dell’interfaccia collegata alla parallela.
Schema Completo
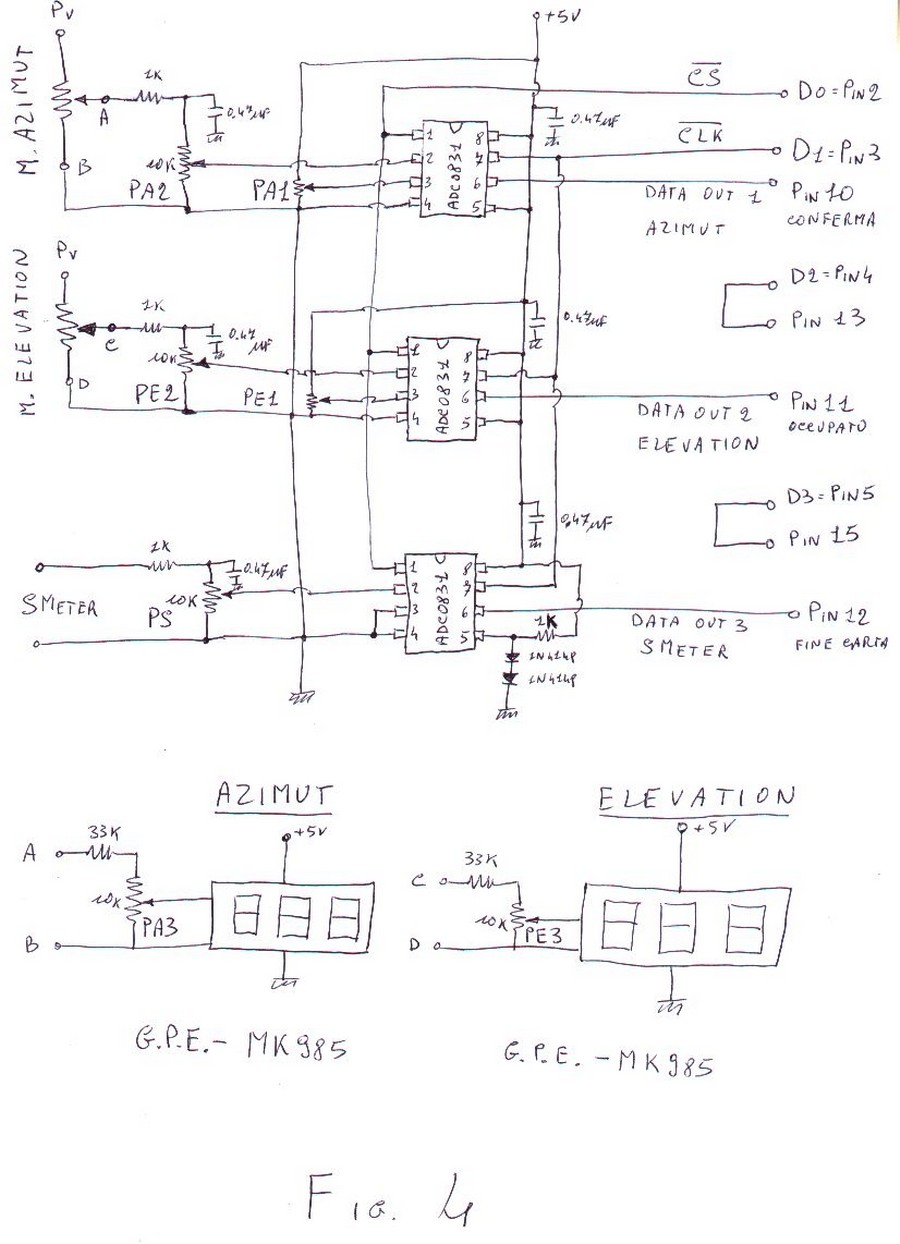
In fig. 4 è mostrato lo schema completo dell’interfaccia del Controllo del Rotore.
Dallo schema si può notare immediatamente che nell’ADC0831 dell’Azimut e dell’Elevation
sono stati aggiunti i trimmer PA1 e PE1 (offset di zero).
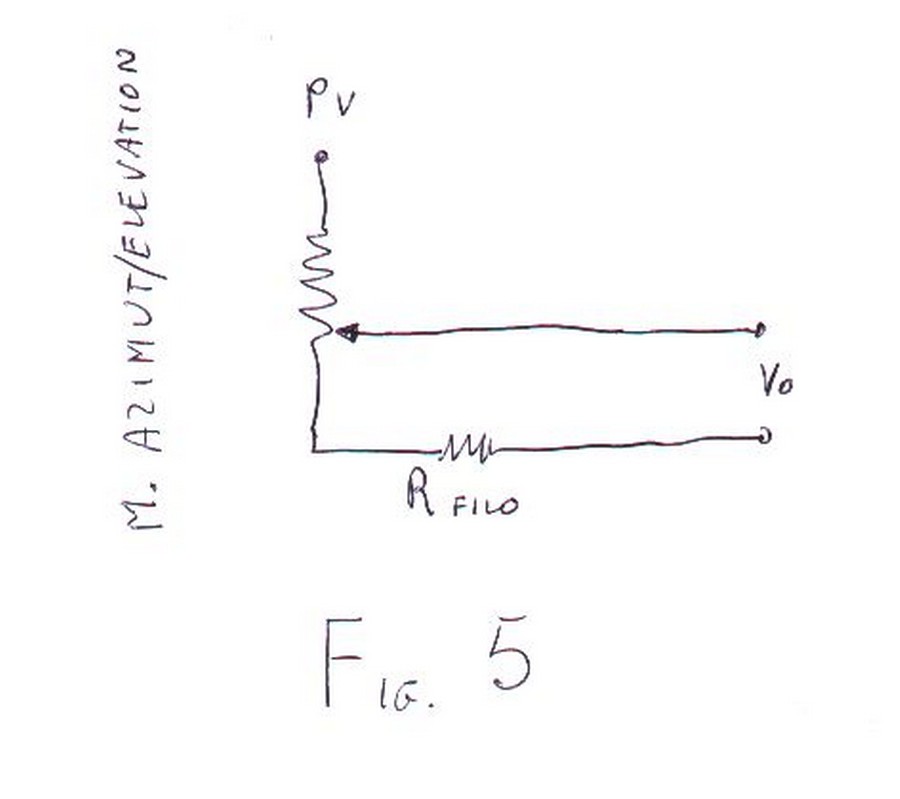
Quando il motore di Azimut e quello dell’Elevation vanno a zero la tensione dei loro
potenziometri non vanno a zero, sia perché i potenziometri non arrivano in fondo scala sia
perché la resistenza del cavo (a causa della sua lunghezza) non è trascurabile (fig.5).
Per cui senza i trimmer PA1 e PE1 l’ADC0831 leggerebbe alcuni gradi quando i rotori sarebbero a zero.
Non è stato messo nessun trimmer nell’SMeter perché quando è zero il suo valore è effettivamente zero.
Nell’SMeter inoltre all’atto pratico la tensione di riferimento di 5Volt è risultata troppo grande per cui è stata ridotta a 1.2Volt.
Questa tensione è stata ricavata semplicemente mettendo in serie una
resistenza e due diodi, prelevando la tensione ai capi dei due diodi ,vedi fig.4.
Tutti i trimmer PA,PE,PS devono essere multigiri per una precisa taratura.
Inoltre in basso alla fig.4 si può notare due kit della G.P.E. MK985, due minivoltmetri digitali a tre
cifre che servono (opportunamente tarati) a leggere i gradi di Azimut e Elevation per spostare
la parabola anche senza l’aiuto del computer (fig. seguente).
Taratura
Si inizia la taratura dell’antenna con l’Azimut.
Si preme il pulsante di “Left” sul “Rotator Controller” (fig. seguente)
o con il mouse sul pulsante “Left” (fig. seguente)
finché il rotore non si arresta a sinistra. Si agisce sul Trimmer PA1 sino a quando sul monitor
non si legge il valore zero (offset di zero). Ora si pone sul rotore un nastro (fig. seguente)
oppure un segno qualsiasi, e si agisce con il pulsante “Right” del “Rotator Controller” o con il
mouse sul pulsante “Right” (fig. seguente) sino a quando il rotore non ha fatto un giro completo,
cioè 360°. Si agisce sul Trimmer PA2 sino a quando sul monitor non si legge il valore 360° .
Finita la taratura di Azimut si passa alla taratura di Elevation (Elevazione) .
Si preme il pulsante di “Down” sul “Rotator Controller” o con il mouse il pulsante “Down” sino a
quando il rotore di Elevazione non si arresta . Si agisce sul Trimmer PE1 sino a quando sul monitor
non si legge il valore zero (offset di zero) (fig. precedente) .
Inoltre con una livella si tara in piano l’antenna (fig. seguente) .
Una volta tarata in piano, si preme il pulsante di “Up” sul “Rotator Controller” o con il mouse il
pulsante “Up” sino a quando il rotore di Elevazione effettua una rotazione di 180°, cioè sino a
quando non risulta dalla livella di essere di nuovo in piano (fig. seguente) .
Si agisce sul Trimmer PE2 sino a quando sul monitor non si legge il valore 180° (fig. seguente) .
A questo punto si è tarato l’Azimut e l’Elevation ora si deve tarare la staffa.
Si deve allentare le viti della staffa (fig. seguente) sino a quando la parabola giri intorno al palo
di sostegno. La taratura della staffa si può fare in due modi .
Primo modo ( usando una bussola) .
Con l’uso di una bussola (fig. seguente)
si allinea la parabola verso il Nord.
Prima si agisce sul “Rotator Controller” o con il mouse sui pulsanti sino a quando non si legge
su Azimut zero e su Elevation zero (fig. seguente).
.Con Azimut zero e Elevation zero la parabola deve puntare verso Nord, per cui si gira la staffa
sino a quando la parabola sia allineata con la bussola.
Secondo modo (Meteosat)
Chi possiede una radiolina che riceve in MF su 134 Mhz è preferibile tarare la staffa con l’aiuto
del satellite Meteosat.
Per prima cosa con l’aiuto di Wxtrack occorre conoscere il valore di Azimut e di Elevation rispetto
al punto di ricezione (fig. seguente) .
I valori di Azimut e di Elevation si leggono sulla barra di stato di Wxtrack (barra in basso) .
Nel mio caso essendo la posizione di ricezione Senigallia si legge Azimut 198,5° e Elevation 38,2 .
Siccome il “Rotator Controller” non prevede i decimali l’Azimut si può approssimare a 199°
mentre l’Elevation si può approssimare a 38° . Agendo con il mouse sui pulsanti di Azimut e di
Elevation sino a quando non appare le coordinate di Meteosat (fig. seguente) .
A questo punto la parabola deve puntare il Satellite Meteosat . Si deve girare la staffa sino
quando sulla radiolina non si sente il caratteristico segnale di Meteosat .
Tarando la staffa al massimo segnale ricevuto si tara l’Azimut di Staffa con una certa precisione,
con un errore non superiore di un paio di gradi .
Eventuale errore di Azimut si potrà compensare con “l’offset di Azimut” .
Finita la taratura si deve effettuare il foro di staffa di Azimut (fig. seguente).
Questo foro con la relativa vite non serve per il sostegno della parabola ma solamente per impedire
alla staffa di girare intorno al palo a causa del vento . Stringere tutte le viti .
Taratura dell’SMeter
Se è possibile prelevare dal proprio ricevitore la tensione dell’SMeter occorre tarare il
trimmer PS in modo che il valore sul monitor vada in parallelo con quello dello strumento
del vostro ricevitore (fig.4).
Taratura dell’ MK985
Dopo aver tarato i due kit MK985 come voltmetri bisogna tararli di nuovo per permettere loro di
leggere i gradi. Si mette a zero l’Azimut e con il trimmer di zero del kit si tara il
minivoltmetro al valore zero. Poi si pone l’Azimut a 360° e si tara PA3 sino a quando il
minivoltmetro non indichi 360°. Si mette a zero l’Elevation e con il trimmer di zero del kit
si tara a zero il minivoltmetro. Poi si pone l’Elevation a 180° e si tara PE3 sino a leggere 180°
sul minivoltmetro. Completata la taratura si potrà spostare la parabola con i pulsanti P1,P2,P3,P4 leggendo direttamente sui minivoltmetri la sua posizione.
Taratura dell’Orologio di Sistema
WXtrack calcola l’Azimut e l’Elevation con il tempo dell’orologio di sistema.
Un errore sul tempo comporterà un errore sui dati e la parabola non sarà allineata al Satellite.
Perciò l’Orologio di Sistema deve essere regolato con la precisione del secondo.
Inoltre il programma di Controllo del Rotore richiede che l’Orologio di Sistema deve essere
regolato cinque secondi circa in anticipo.
Wxtrack invia le coordinate attraverso la seriale ogni quattro secondi circa. Questo intervallo se è
sufficiente quando il Satellite si trova alle basse Elevazioni, risulta troppo alto quando il Satellite
si trova in Elevazione vicino ai 90°. Infatti in queste condizione tra un invio e l’altro (cioè in 4
secondi) si può avere valori di Azimut che differiscono di 40° o maggiore. In queste condizioni la
parabola potrebbe essere puntata a Sud mentre il Satellite si trova a Nord. Per questo motivo il
programma di Controllo del Rotore deve essere in grado di spostare la parabola anche fra un invio e l’altro.
Per fare questo il programma a bisogno non solo di conoscere le coordinate dove puntare
la parabola ma anche quelle successive. Il modo più semplice per far conoscere al programma le
coordinate successive è quello di regolare l’Orologio di Sistema cinque secondi in anticipo.
In questo modo WXtrack avrà inviato al programma non solo le coordinate dove puntare il Satellite
ma anche quelle successive . Il programma di Controllo del Rotore aggiorna la posizione della
parabola quattro volte al secondo, per cui nel caso di Elevazione vicino a 90° e valori di intervallo
di Azimut di 40°, la Parabola nell’intervallo di quattro secondi si sarà spostata 16 volte restando
sempre allineata con il Satellite.
Un poco di Teoria
Lo Yaesu G-5500 si può spostare in Azimut di 450° mentre in Elevation 180° (fig.seguente) .
Fig. 7 ( Controllo Originale Yaesu )
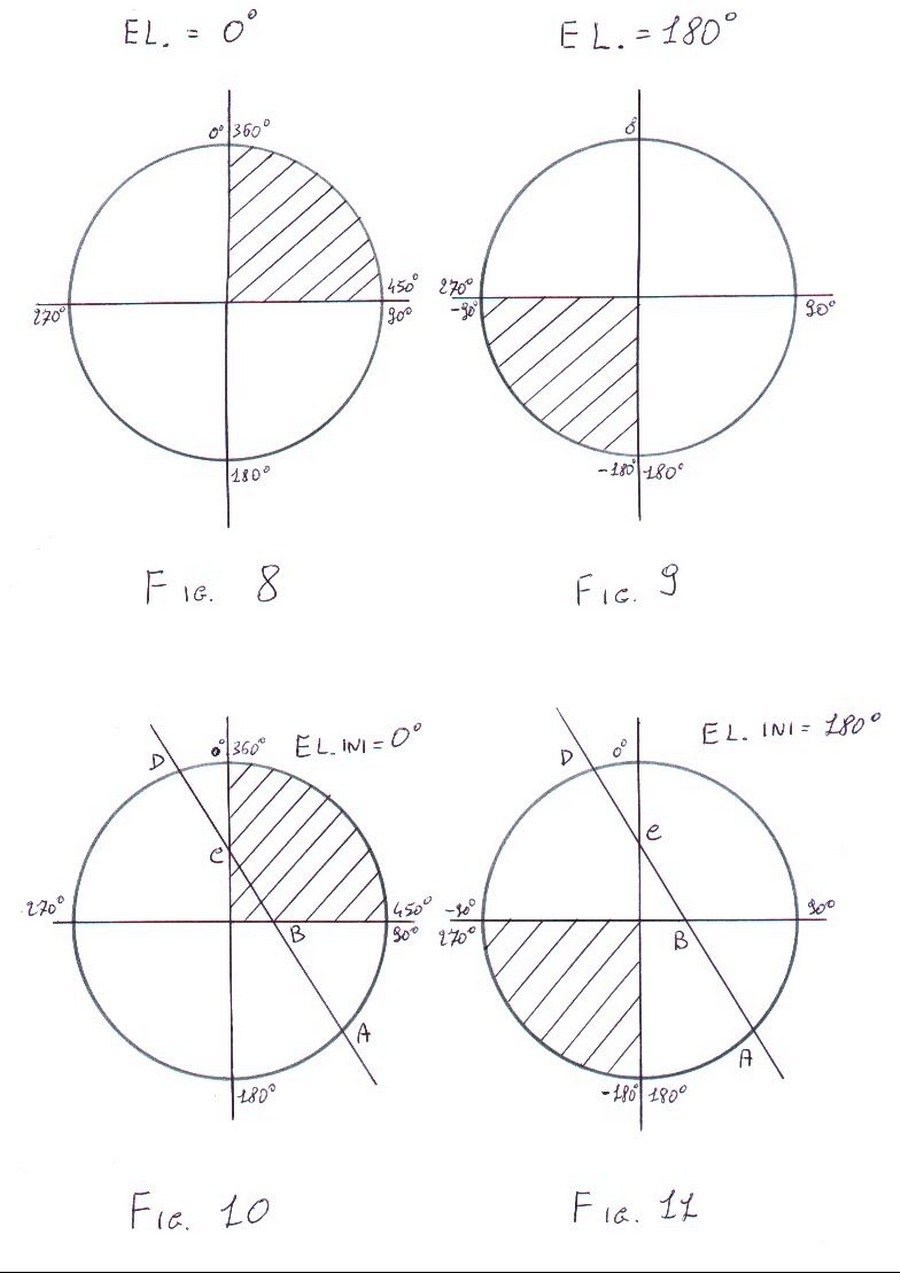
Ponendo i gradi di Azimut in grafico si ottiene la fig.8 dove la parte tratteggiata è passata due volte, essendo i gradi di rotazione di Azimut 450°.
Il punto Azimut 0°, Elevation 0° è identico al punto Azimut 180°, Elevation 180°.
Con Azimut 180 e Elevation 180° si ottiene la fig.9 dove la parte tratteggiata è passata due volte.
La differenza fra la fig.8 e la fig.9 sta nel fatto che nella fig.8 l’angolo passato due volte va da 0° a
90° mentre nella fig.9 l’angolo passato due volte va da 180° a 270° .
Per cui con El.ini =0 l’angolo di rotazione sarà da 0° a 450° mentre con El.ini=180° l’angolo di
rotazione sarà da –180° a 270° .
Supponiamo di effettuare un allineamento con un satellite che ha una traiettoria come quella in
fig.10 partendo dal punto A e arrivando al punto D. Con una Elevazione di inizio di 0° la
traiettoria del satellite non potrà essere portata a termine. Infatti il rotore partendo da A potrà
ruotare sino al punto C, in quel punto avrà una angolazione zero e non potrà andare oltre.
Con una Elevazione di inizio di 180° (fig.11) la traiettoria potrà essere portata a termine
da A sino a D.
Perciò per portare a termine una traiettoria occorre conoscere la corretta Elevazione di inizio.
Per lo Yaesu G-5500 vale la seguente regola.
Se la traiettoria del satellite passa rispetto al punto di ricezione …
…a Nord à El.ini=180° …a Sud à El.ini=0°
Nel caso si voglia essere sicuri che il rotore possa sempre portare a termine la traiettoria occorre
sempre individuare dove passa il satellite e inserirlo nell’opzione El.ini prima di avviare il
programma.
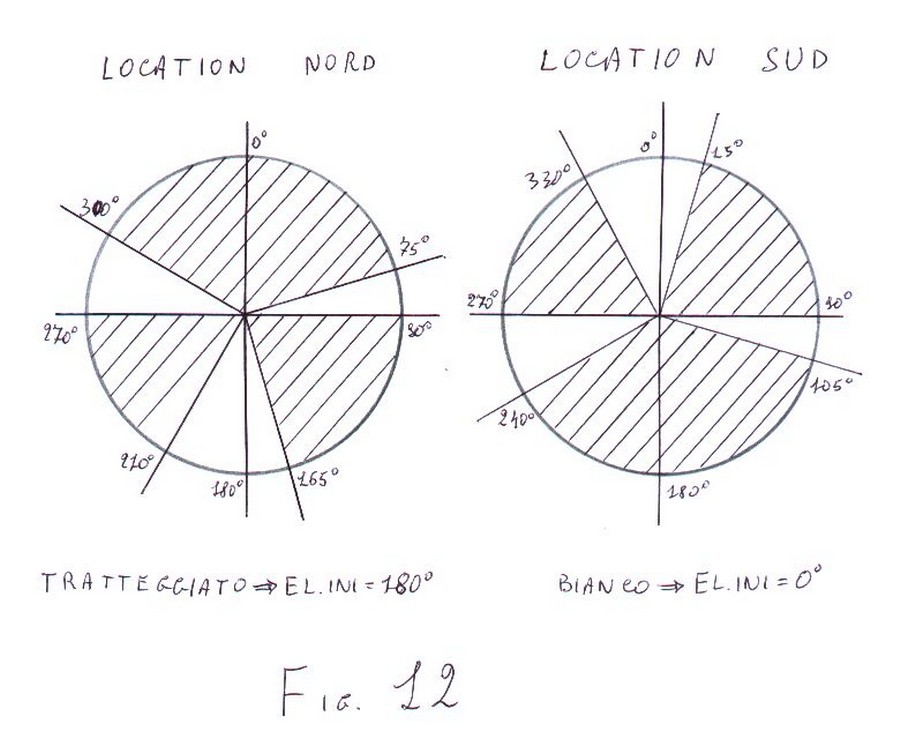
Configurazione automatica
Nel caso non si effettui nessuna scelta di configurazione, il programma si configura
automaticamente, ma in questo caso non si può garantire la corretta configurazione,
ma statisticamente parlando, si potrebbe avere un errore di configurazione ogni cento
configurazioni esatte. L’errore di configurazione è possibile solo quando il satellite passa
molto vicino al punto di ricezione, con una Elevazione vicino a 90°. In configurazione
automatica il programma assume El.ini come mostrato in fig.12.
Se non si ha necessità di avere una configurazione esatta si consiglia di lasciare il programma
in configurazione automatica perché la possibilità di errore è molto bassa (inferiore a uno su cento), e trovare ogni volta con WXtrack la traiettoria è molto scomodo.
Programma del Controllo del Rotore
Il programma “Rotator Controller” usa la parallela per comunicare con l’interfaccia, e la seriale
per ricevere le coordinate da Wxtrack . Per cui occorre un cavo seriale invertente (o Nul Modem) per collegare la seriale COM1 con la seriale COM2 . Questo è l’unico modo per inviare i dati da Wxtrack al programma “Rotator Controller”. Nel caso in cui si usi la COM1 come dati di uscita di Wxtrack si deve usare COM2 come dati di ingresso per il programma “Rotator Controller” , o viceversa.
Inoltre nel programma WXtrack occorre settare il protocollo di uscita come EasyComm,
essendo questo protocollo che riconosce il programma “Rotator Controller”, vedi fig. seguente.
Nel caso di settare WXtrack come la fig. precedente si deve settare il programma “Rotator Controller” come fig. successiva.
Il programma “Rotator Controller” riceve da Wxtrack solo le coordinate del satellite, senza nessun
altro dato, per esempio l’inizio e la fine della traiettoria .
Per questo motivo il programma si può affidare solo ai “timeout”.
Per cui quando su Wxtrack si passa rapidamente da un satellite all’altro, occorre fare click su STOP
e poi click su START sul programma “Rotator Controller”, per azzerare tutti i “timeout”.